Listen to audio version of this blog post:
We are developing a new method for 3D building reconstruction from LiDAR pointclouds which will soon be added to BrightEarth. Learn how that helps you map your world.
Key takeaways:
- We developed a new approach to 3D building reconstruction from LiDAR
- Learn why we developed this new approach to LiDAR data processing
- Find out how it helps your industry
We are currently seeing significant growth in the use and application of LiDAR technology. According to one recent forecast, the LiDAR market will grow from USD $1.95 billion in 2023 to almost $14 billion in 2033.
As impressive as the technology is, data from airborne LiDAR scanning needs to undergo a significant amount of processing before it can be useful to users. At LuxCarta, we’re continually investigating new ways to use LiDAR in our mapping solutions. We recently had a paper accepted for the upcoming IEEE/CVF Conference on Computer Vision and Pattern Recognition 2024. The paper describes a new technique we’ve developed for LiDAR building footprint extraction and 3D reconstruction.
Very quick reminder of LiDAR technology
LiDAR, which stands for Light Detection and Ranging, is a technique to collect data about the surface of the Earth in 3D.
An airplane or drone with a LiDAR sensor flies over an area of interest. A LiDAR laser scanner then sweeps over the ground. As the light reflects back, the sensor records how long it takes the light to return. This information is used to calculate the elevation above the ground of things below, such as buildings or trees.
Say the LiDAR scans a building with a gabled roof. Light from the ridge of the roof would bounce back sooner than light from the eaves. Depending on the time difference, calculating the height of the roof with a good degree of accuracy is possible.

For a more detailed overview of LiDAR mapping, read our introductory article.
The Need for 3D Building Reconstruction from LiDAR
Around the world, numerous airborne LiDAR scanning projects are currently underway or have been completed. For example, France’s geographical services department (Institut Geographique National) has collected LiDAR point cloud data for most of the country’s territory. However, to get useful insights from these vast data sets, it must be processed. Numerous low-level processing phases are carried out - often by the LiDAR data acquirer - right up to the point cloud classification phase, in which each point is assigned a thematic nature (soil, building, vegetation, etc.).
One of the most promising uses of these large point clouds is to reconstruct 3D buildings in vectorial format, and geo-locate them on interactive 3D maps. This process of 3D building reconstruction from LiDAR has many potential uses:
- Digital twin technology
LiDAR allows us to accurately record the height and shape of buildings and other landscape features. That makes it an ideal input for digital twin solutions - for towns, cities, ports, airports and many other locations.
- Urban planning and modeling
Urban planners can use LiDAR to create accurate 3D models of towns and cities. This provides a much richer, more interactive way of planning the urban environment. They can visualize what new developments will look like, discover obstacles in the line of sight, and plan services more efficiently.
- Simulations
From vehicle training simulations, to video games and entertainment, or metaverse applications, the ability to reconstruct real-world buildings in 3D can be highly valuable for a range of businesses.
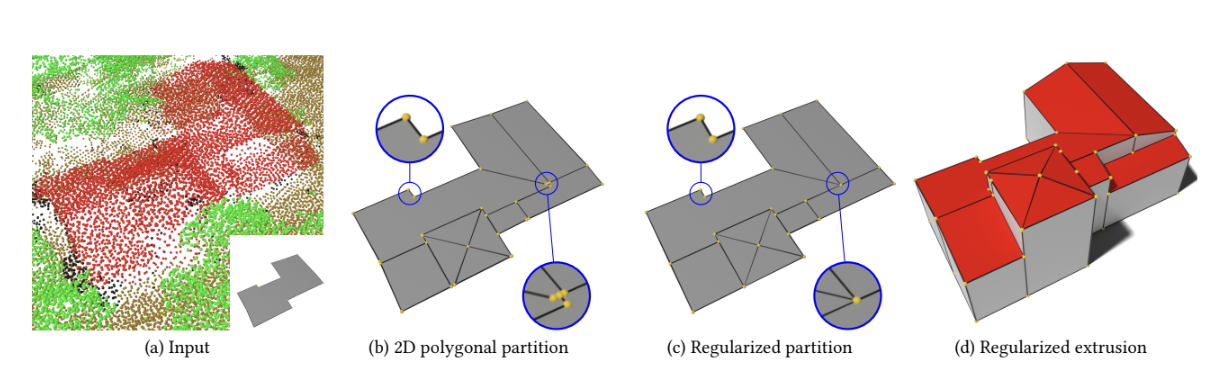
Departing from a LiDAR scan and a building footprint (a), we first construct a 2D polygonal partition of the roof structure (b). The partition is then regularized to both enforce orthogonality, parallelism, and collinearity between edges and simplify the vertex layout (c). Finally, the partition is extruded using an optimization procedure that preserves the planarity of roof sections and the horizontality of rooftop edges.
Problems with earlier LiDAR 3D building reconstruction
For many years, researchers have been proposing methods for 3D building reconstruction from LiDAR. However, existing approaches have significant drawbacks:
- Lack of regularity: Many plane-based approaches to 3D building reconstruction from LiDAR attempt to use point cloud data to create planes (flat surfaces). However, they tend to produce irregular, complex surfaces (unlike the fairly uniform surface shape of many roofs and walls).
- Joining vertices: Vertices (the points where different parts of a roof connect) often fail to connect at a single point in most of today’s standard methods for reconstructing buildings from LiDAR. Instead, they tend to produce ‘clusters’ of vertices. Again, this is overly complex, and unlike the way most real-world roofs fit together.
These, and similar issues, mean that recreating 3D buildings from LiDAR is often time-consuming and complex. And, most significantly, the 3D buildings produced often fail to accurately represent the real-world buildings they’re meant to represent. They often require a considerable amount of manual effort to ‘tidy up’ the building models.
We wanted to develop a more efficient, simple, and reliable way of turning LiDAR point clouds into 3D buildings.
SimpliCity: a New Method for 3D Building Reconstruction from LiDAR
In recent months, the LuxCarta research and development team has designed and tested a robust new method for reconstructing 3D buildings from LiDAR point clouds. The great strength of our process is that it offers a simpler, faster, and more reliable way to create 3D buildings.
One of the important innovations in our process is that we first construct a 2D polygonal partition of the roof structure (rather than trying to create the whole thing in 3D first). We start with a 2D building footprint extraction process to separate the structure from its surroundings. We then analyze the LiDAR point cloud to identify planes and vertices. The process then simplifies the layout of vertices and planes as far as possible, eliminating duplication. Only once we have created a 2D model for the roof, do we then extrude the building from the surrounding landscape.
We tested our technique against other methods by using LiDAR point clouds from Tallinn, Zurich, and Helsinki. Our approach consistently provided:
- A high degree of accuracy and similarity to the real-world structures we were attempting to reconstruct in 3D.
- Less dense polygons, with fewer planes and vertices than alternative solutions.
- Very fast individual building footprint extraction suggests that the method is suitable for scalable 3D modeling at the city, regional, or national scale.

Learn more: Read the full copy of our IEEE/CVF conference paper
SimpliCity is now available in BrightEarth
BrightEarth is LuxCarta’s cloud-based product for global mapping. It allows users to select any location on the Earth’s surface and generate up-to-date, interactive maps. BrightEarth uses AI to perform complex processes that, until recently, required years of professional experience and manual work.
We have also chosen to integrate SimpliCity with our BrightEarth technology over the coming months for all our customers. This means you'll be able to reconstruct 3D buildings from LiDAR and interact with high-fidelity 3D maps of all cities and regions where LiDAR point clouds are available.
Intrigued? Contact us for a demo.
You may like: Why orthorectification is vital for real-world simulation and training environments